Latest News



Recent publications
Research projects

Learning Variable Impedance Control for Aerial Sliding on Uneven Heterogeneous Surfaces by Proprioceptive and Tactile Sensing
, “Learning Variable Impedance Control for Aerial Sliding on Uneven Heterogeneous Surfaces by Proprioceptive and Tactile Sensing”, IEEE Robotics and Automation Letters, pp. 1-8, 2022.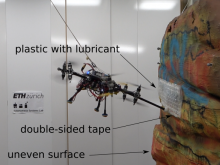
Published in the Special Issue: Variable Impedance Control and Learning In Complex Interaction Scenarios: Challenges and Opportunities
Preprint: