Latest News



Recent publications
Research projects

Human Aerial Robot Interaction
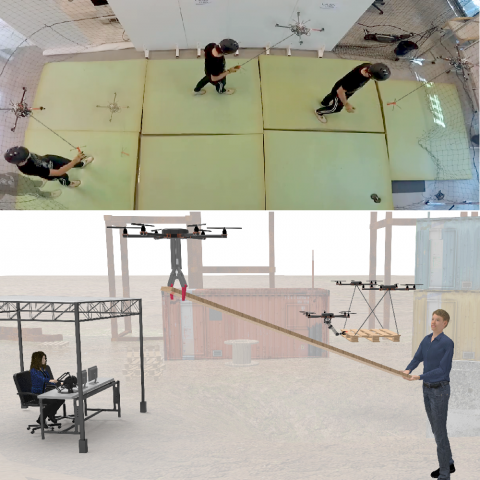
One of the primary goals of robots is to provide physical support and increase mental and physical relaxation of humans performing complex and burdensome tasks. In many physical interaction applications, the high complexity of the task and the high unstructured nature of the environments require the robotic systems to operate in tight collaboration with humans.
However, the field of human-aerial robot interaction is still mostly unexplored due to the high risk that aerial vehicles might represent for humans. So far, the aerial robotic community focused almost exclusively on the remote control (with and without haptic feedback) of aerial vehicles in contact-free flight, for visual inspection and surveillance. My objective is to study the novel and still unexplored research field of physical Human-Aerial Robot Interaction (pHARI).
Related references
- , “Mixed Reality Human-Robot Interface to Generate and Visualize 6DoF Trajectories: Application to Omnidirectional Aerial Vehicles”, in 2023 International Conference on Unmanned Aircraft Systems (ICUAS), 2023. Pdf
- , “State-Aware Path-Following with Humans Through Force-based Communication via Tethered Physical Aerial Human-Robot Interaction”, in 2023 International Conference on Unmanned Aircraft Systems (ICUAS), 2023. Pdf
- , “Design and Evaluation of a Mixed Reality-based Human-Robot Interface for Teleoperation of Omnidirectional Aerial Vehicles”, in 2023 International Conference on Unmanned Aircraft Systems (ICUAS), 2023. Pdf
- , “Towards 6DoF Bilateral Teleoperation of an Omnidirectional Aerial Vehicle for Aerial Physical Interaction”, in 2022 IEEE Int. Conf. on Robotics and Automation, 2022. Pdf Video
- , “Human-State-Aware Controller for a Tethered Aerial Robot Guiding a Human by Physical Interaction”, IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2827-2834, 2022. Pdf Video
- , “Modelling and Estimation of Human Walking Gait for Physical Human-Robot Interaction”, in 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), 2021. Pdf
- , “Physical Human-Robot Interaction with a Tethered Aerial Vehicle: Application to a Force-based Human Guiding Problem”, Transactions on Robotics, vol. 37, no. 3, pp. 723-734, 2021. Pdf Video