Latest News



Recent publications
Research projects

Robust and Agile Transportation of Cable Suspended-Loads with Multi-Drone Systems
Type of position:
PhD
Short abstract:
This project enhances multi-drone systems for transporting cable-suspended loads, emphasizing autonomy, robustness, and human interaction. Objectives include improving perception with onboard cameras and Control Barrier Functions (CBF), employing Nonlinear Model Predictive Control (NMPC) for motion generation, and developing shared control for intuitive human-drone interaction. Anticipated outcomes include advanced capabilities applicable to search and rescue, infrastructure maintenance, and logistics.
Description:
A predominant objective of robotics is developing autonomous systems capable of assisting humans in challenging, laborious, or hazardous tasks, particularly in environments that are difficult to access, such as high altitudes, outer space, or places with radiation exposure. To overcome these problems, aerial vehicles (a.k.a. drones or UAVs) are an effective solution. On one side, they have already proven to be excellent in performing several tasks – spanning from navigation to surveillance – mostly thanks to their agility and ability to move quickly. On the other side, despite recent advancements on these “navigation” tasks and promising application scenarios, current results on drones are still very preliminary in terms of (1) collaborative manipulation skills and strategies, (2) payload and endurance capabilities, as well as (3) human-drone interaction and control. However, possible applications requiring physical contact and manipulation skills are numerous: structure assembly, contact-based inspection, transportation, harvesting, etc.
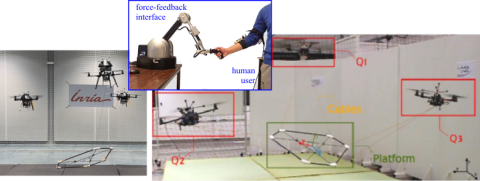
The most frequent approach to endow a drone with manipulation capabilities is the installation of dedicated equipment, such as grippers or robotic arms. Alternatively, the manipulation/transportation of objects can be performed cooperatively by multiple agents using cables or tethers. This latter approach has the advantage of simplicity and flexibility, as it allows the transportation or manipulation of possibly large, bulky, or heavy objects, like a stretcher in search and rescue scenarios. However, this approach requires accurate planning/control algorithms, as well as the precise coordination of the drones for the cooperative transportation/manipulation. Depending on the task at end, such cooperative actions can also be carried out by multiple drones remotely controlled at high-level by a human operator (see Fig. 1 for an illustrative example). This allows blending the autonomy of the multi-drone system with the higher cognitive capabilities of a human operator who can be in charge of general aspects of the mission (what object to pick, where to release it, etc.).
The work will be carried out at IRISA-CNRS in Rennes as part of the Rainbow team, which is internationally recognized for its scientific activity as well as for technology transfer experience in the field of shared control, multi-robots, haptics, sensor-based control, visual tracking, and visual servoing.
Envisaged Activities:
The goal of this PhD Thesis is to advance the state-of-the-art in the field of multi-drone transportation of cable-suspended loads along several key directions:
-
Perception and Localization: Most previous experiments in this domain have relied on precise localization provided by external motion capture systems. This thesis aims to relax this assumption by using onboard drone cameras to localize the relative positions between the drones, the suspended platform (e.g., using visual markers), and the overall system position. This is a non-trivial challenge due to the limited field of view of the cameras and the potential conflicts between the task requirements and the need for each drone to maintain the platform and other drones in their field of view. The researchers plan to address this using a distributed approach based on Control Barrier Functions, which can help relax the constraints on maintaining visibility.
-
Robust and Online Motion Generation: Cable-suspended multi-drone systems face numerous constraints related to perception, actuation, geometry, and stability. The thesis will address these challenges by leveraging Nonlinear Model Predictive Control (NMPC) techniques, which can generate online feasible motion plans that meet the constraints and optimize for factors like task error, energy consumption, and completion time. A key focus will be on generating aggressive maneuvers that minimize time while dampening load oscillations, in order to fully exploit the drones’ actuation capabilities. Additionally, the researchers will incorporate robustness guarantees into the NMPC formulation, using metrics they have recently developed to quantify the system’s resilience to parametric uncertainties in the models.
-
Human-Multi-Drone Interaction: The project will address the problem of interfacing a human operator with the multi-drone system by developing shared control techniques. The goal is to allow the human to provide intuitive high-level commands (e.g., commanding the load’s linear velocity) that will then be processed by the group autonomy (the NMPC algorithm) to produce a feasible motion plan. This will help the human operator effectively accomplish the assigned task together with the robots, while providing the operator with rich information about the robots’ actions (e.g., through force or visual cues) to increase task performance and trust in the robotic system.
Conditions:
- The Ph.D. position is full-time for 3 years (standard duration in France). The position will be paid according to the French salary regulations for PhD students.
- We do high quality and impactful research in robotics, publishing on the major journals and conferences.
- We often collaborate with other top researchers in europe and worldwide.
- You will have access to a well established laboratory including:
- two flying arenas equipped with motion tracking system, several quadrotors, and a few fully-actuated manipulators,
- one robotic manipulation lab equipped with several robotic arms, like the Franka Emika Panda.
- You will be part of an international and friendly team. We organize several events, from after works, to multi-day lab retreat.
- Regular visits and talks by internationally known researchers from top research labs.
Requirements:
- M.Sc. degree in mechatronics, robotics, engineering, computer science (or related fields)
- Excellent written and spoken English skills
- Good experience in C/C++ , ROS, Matlab/Simulink, CAD
- Good experience with numerical trajectory optimization tools for robotics (e.g., use of CaSaDi, Acado, Autodiff, Crocoddyl, etc.)
- Scientific curiosity, large autonomy and ability to work independently
- Experience with robotic systems and/or aerial robots is a plus
How to apply:
Interested candidates are requested to apply via this form. The position will remain open until a satisfactory candidate is found.
In case of positive feedback, you will be contacted. If not positive, you won't hear back.
Applications sent directly by email and not through the web form will not be considered!!
Supervisors :
Dr. Marco Tognon
Dr. Paolo Robuffo Giordano
Dr. Claudio Pacchierotti