Latest News



Recent publications
Research projects

Collaborative Articulated-Object Manipulation with Multi-drone Systems
Type of position:
Master thesis
Short abstract:
The goal of this Master Thesis is to exploit recent advancements in the optimal control theory to design a manipulation planner that can effectively handle complex interactions and extend those results to multiple collaborating robots in the context of object manipulation.
Description:
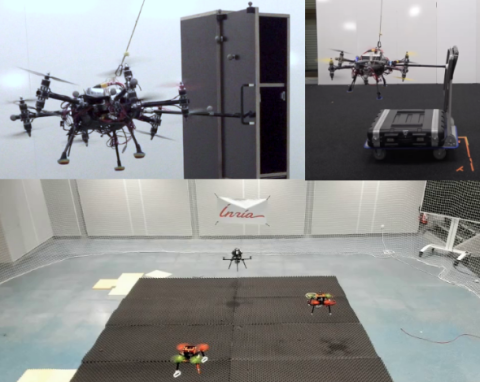
In the last decade, new aerial robots with enhanced actuation capabilities and equipped with articulated arms are investigated for challenging physical interaction tasks. However, because of their limited payload, researchers are trying to conceive teams of aerial manipulators that are able to perform physical work for new applications domains like in construction, inspection, maintenance, etc.
Current works on Aerial Physical Interaction (AphI) consider one drone with single point contacts and focus on the control of the single interaction force of the robot, assuming the contact remains constant. However, real manipulation tasks often involve multiple contacts and interaction forces, hence the need for multiple aerial manipulators working cooperatively.
Some practical examples of collaborative aerial physical interactions with fleets of drones may be: the opening of doors and removal of debris, e.g., in post-disaster areas; turning valves or stacking materials in a construction site.
The goal of this Master Thesis is to exploit recent advancements in the optimal control theory to design a manipulation planner that can effectively handle complex interactions and extend those results to multiple collaborating robots in the context of object manipulation. More precisely, we will rely Sampling-based MPC methods, also known as Model Predictive Path-Integral Control (MPPI), which should be adapted to multi-robot systems.
List of 5 bibliographical references:
- M. Tognon, H. A. Tello Chávez, E. Gasparin, Q. Sablé, D. Bicego, A. Mallet, M. Lany, G. Santi, B. Revaz, J. Cortés, and A. Franchi, “A truly redundant aerial manipulator system with application to push-and-slide inspection in industrial plants,” IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1846–1851, 2019.
- M. .Brunner, G. Rizzi, M. Studiger, R. Siegwart, and M. Tognon, “A planning-and-control framework for aerial manipulation of articulated objects,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 689–10 696, 2022.
- G. Nava, Q. Sablé, M. Tognon, D. Pucci, and A. Franchi, “Direct force feedback control and online multi-task optimization for aerial manipulators,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 331–338, 2020.
- O. Shorinwa and M. Schwager, "Distributed Contact-Implicit Trajectory Optimization for Collaborative Manipulation," 2021 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), Cambridge, United Kingdom, 2021, pp. 56-65.
- O. Shorinwa and M. Schwager, "Scalable Collaborative Manipulation with Distributed Trajectory Planning," 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 2020, pp. 9108-9115.
Envisaged Activities:
-
At first, the student will become familiar with the relevant literature on this subject (some references are listed below), and with the our aerial manipulator and the software used in the team for simulations and experimental implementation (ROS, Matlab).
-
Then, the student will take over the existing works on MPPI for fast re-planning in manipulation tasks and fully grasp them
-
Subsequently, the student will be able to start working on adapting the current work to the context multiple aerial manipulators for collaborative object manipulation.
-
Finally, the student will validate the theoretical findings in simulation and, if the time allows, in experiments using the drones available in the team.
Requirements:
-
High motivation and interest in the topic
-
Good knowledge in control theory and robot modeling
-
Basic knowledge of multi-agent systems modeling and control
-
Experience in Python or C++, ROS, Matlab/Simulink, Gazebo
-
Scientific curiosity
The work will be carried in English at the Inria Rennes Bretagne Atlantique research center.
How to apply:
Applications are considered only through the following form: https://forms.gle/ib48k7ntn9hWnzKE6
Supervisor(s): Dr. Marco Tognon, Dr. Esteban Restrepo, and Nicola De Carli
Email: marco.tognon@inria.fr, esteban.restrepo@inria.fr, nicola.de-carli@inria.fr
Website: https://mtognon.aslethz.cyon.site/, https://team.inria.fr/rainbow/esteban-restrepo/, https://team.inria.fr/rainbow/nicola-de-carli/
Financial support offered to the student: gratification de 3,75 € / h
Supervisors :
Dr. Marco Tognon